También, ahora con uno de los primeros trabajos de la última persona que se integró hace poco al taller.
Bueno, a lo que vamos. Aquí está lo último que se ha realizado.
Atropellando a las pitufinas
Aquí, lo que tenían que hacer, era atropellar a las pitufinas que están heridas (para asegurarse de que ya no sufrirán más, claro está). Es importante que sepan que esta práctica se realizó 100% usando sensores (de color, de ultrasonido, de giro, etc.). A ver que les parece.
Chocando con las paredes
En esta otra práctica, el objetivo era usar el sensor táctil para detectar cuando el robot chocó con las paredes. Y el sensor de giro para controlar las vueltas de 180°.
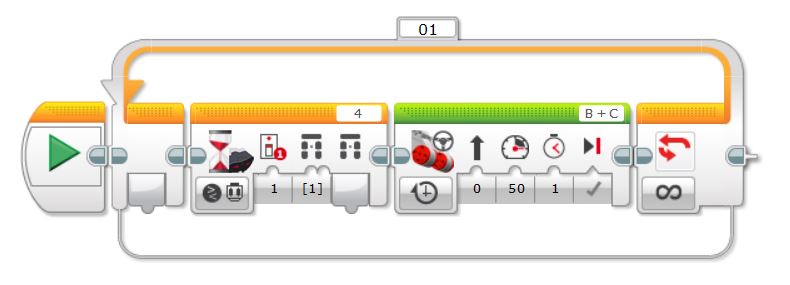
Visitando a los animalitos
Y este es precisamente el trabajo de nuestra nueva integrante. Se trata de un robot que visita a sus cuates los animalitos. Esto no usa sensores, aquí solo se usaron funciones de avance y vuelta, al tanteo.
¡¡Epa!! ¡¡Está borracho!! Ok, en realidad no. Es solo que el centro de gravedad está muy alto. Es parte del aprendizaje. Ahora ya sabe que le tiene que poner los ejes de las llantas un poco más largos.
Rueda Libre
Aquí, realizando pruebas de un carrito con Rueda Libre. ¿Cómo llegará más lejos? ¿con llantas más grandes? ¿con llantas más pequeñas? ¿es que el tamaño de las llantas no importa? ¿con más altura? ¿con menos? No se preocupen, l@s alumn@s ya tienen la respuesta, solo habrá que preguntarles a ell@s.
Carrito de carreras
Por último y como siempre, aquí está el trabajo de las nuevas generaciones, nada más para que se queden con el ojo cuadrado: ¡¡un carrito de carreras, eh!!