Aquí cerrando el año que por cierto se pasó, rapidísimo. Y es que con este asunto de los robots, todo es tan maravilloso que el tiempo se pasa volando.
Esta vez les muestro algunas de las últimas prácticas que se realizaron en todavía este año 2018.
Laberinto
Utilizando sensores de distancia y de giro, con un pequeño programa de apenas un puñado de instrucciones, este robot logra llegar al final del laberinto, para reunirse con el pollito que ahí se encuentra:
Estacionando el auto
Aquí tenemos un robot que se estaciona junto a un edificio que por cierto se construyó ese mismo día. Al más puro estilo de Mr. Bean 😀
Tortuga Logo
Como parte de las actividades que realizan los participantes para practicar la programación, tenemos aquí algunos programas escritos para la Tortuga Logo. Sí, así es, nada más y nada menos que la Tortuga Logo, como parte del desarrollo intelectual de los participantes. En esta ocasión, una personita de 9 años:
Se trata de dos ruedas colocadas sobre dos ejes paralelos.
Las ruedas están en contacto directo, de forma tal que cuando una gira provoca
que la otra también gire, gracias a la fricción (rozamiento).
A la rueda que se hace girar se le llama rueda conductora.
Al que gira por medio de la fricción se le llama rueda conducida.
Al igual que ocurre con los engranes, las ruedas de fricción
siempre girarán en sentidos opuestos. Si se requiere que giren en el mismo
sentido, se necesita agregar una tercera rueda en medio, llamada “rueda loca” (ver
sección de ejemplos del tema de Engranes).
Si las dos ruedas son del mismo tamaño, ambas girarán a la
misma velocidad. Si no, entonces la rueda más pequeña girará más rápido.
Relación de Transmisión
Para determinar la relación entre dos ruedas de fricción, se divide el diámetro de la rueda propulsada entre el diámetro de la rueda motriz.
relación de transmisión = diámetro de la rueda propulsada / diámetro de la motriz
Hola a todos. En esta ocasión les vengo mostrando algunas de esas prácticas que se realizan con el fin de que practiquen, principalmente, la programación.
Repeticiones mediante bucle
Aquí, controlando al robot mientras, al mismo tiempo, practican las repeticiones mediante un bucle.
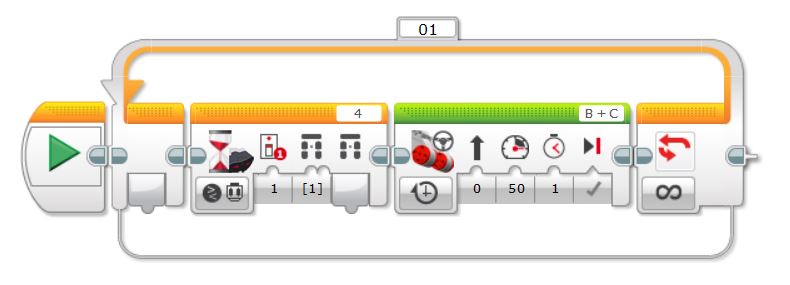
Interrupción de bucle
Aquí, se trata de un ciclo "infinito", en el cual el robot estará repitiendo una misma acción hasta que ésta sea interrumpida.
Grúas
Y por último, un dos grúas que se construyeron en los últimos días por alumnos que se integraron al taller en semanas recientes.
Con gran entusiasmo, ahora que el taller no está limitado solo a la robótica educativa real, sino que algunos participantes están aprendiendo también Karel y la Tortuga Logo, les comparto algunas de las prácticas que hemos realizado en las últimas semanas.
Esta vez con otras 3 prácticas específicas de mecanismos, para reforzar conocimientos.
Carrito que sube una pendiente
Este carrito tiene la característica de que cuando se lanza, empieza a subir la pendiente, pero cuando se le termina el impulso y se para, no se va para atrás, sino que tiene un mecanismo de freno que lo detiene automáticamente.
Caja fuerte
Este fue un reto. Se retó a las participantes a construir una caja fuerte que no fuera posible abrir en menos de 30 segundos. Véanlo y decidan si les quedó bien:
Murciélago
Aquí se trataba de construir un mecanismo que moviera las alas de un murciélago mecánico. En lo personal, creo que quedó muy padre
Carrito de Carreras
Por último, este fantástico carrito de carreras que construyó uno de los participantes que se integró hace poco al taller.
Hola a todos. Aquí continuando con la preparación con vistas a competir en el 2019, aquí les muestro una serie de prácticas interesantes, pero sobre todo complejas.
Dos artefactos creados por las participantes desde cero, sin ningún manual, sin ninguna ayuda, solo usando sus conocimientos y su creatividad. A ver que les parece.
Batidora
Se trata de una batidora manual, la cual, como podrán ver, realmente funciona, y no se anda desarmando, lo hace muy bien.
Estampando Sellos
El objetivo era crear un artefacto que tuviera un mecanismo de estampado de sellos, utilizando energía eólica (o sea, el viento). Como verán les quedó muy bien. Lo más importante es que funciona.
Robot con patas como un bicho
Continuando con la búsqueda de vehículos que caminen y den vueltas, esta vez se probó con un robot que tiene patas, como los bichos. Y además se aprovechó la práctica para usar el control remoto.
Iniciando un nuevo año de trabajo, con algunas personitas nuevas, y esperando que pronto se integren algunas más, les muestro lo que hemos estado haciendo durante las vacaciones.
Cabrestante
Se trata de un mecanismo utilizado en los puertos para arrastrar a los barcos pequeños y a las lanchas fuera del agua. En esta ocasión le toco a algunas alumnas construir su propia versión. Con un mecanismo especial que les permitiera detener el arrastre sin que el vehículo se internara de nuevo en el agua.
Aquí está lo que construyeron:
Prácticas de sensores de luz
En esta ocasión les tocó a algunas participantes usa el sensor de luz para controlar los movimientos del robot. En un caso, el robot tenía que mover las alitas, y dejar de moverlas, cada vez que se le enviaba un haz de luz. En el otro caso, el robot tenía que caminar y detenerse cada vez que recibía un haz de luz.
De vuelta en casa, después de haber pasado unos días fabulosos en un lugar muy bonito (Culiacán, Sinaloa). Donde todo lo que uno come es delicioso (pero de verdad, delicioso). Donde toda la gente es super amable. Donde hice nuevos amigos, que ahora cuentan entre las personas más agradables que conozco, con una calidad humana excelente. Donde después de, no se, 20 años tal vez, con gran alegría volví a ver a una persona que también es super agradable (Yito Geratti, de la secundaria), y que espero seguir teniendo oportunidades de verla.
Con tanto que me gustaría contarles... iniciaré por contar lo que hemos hecho en el taller últimamente 😁.
Prácticas de GiroSensor
Sucede que después de nuestra desastrosa eliminación de la WRO, mis alumnas creían que el giro sensor no servía. De hecho, algunos otros competidores les dijeron exactamente eso, que no lo usan por que no sirve.
Pues bien, aquí les demostramos exactamente lo contrario. Solo es cuestión de usarlo bien. En estos dos ejemplos, verán como puede seguir una trayectoria formando un cuadrado, y una espiral. Espero les guste:
Catapulta
Como práctica de estructuras y mecanismos, esta vez les tocó hacer una catapulta, con ciertos requerimientos (una distancia mínima de lanzamiento, que tuviera llantas, etc.). ¡Y que bien les quedó, que hasta pasamos un rato agradable jugando a los soldaditos!
Luces y Sonido
Por último, una práctica con luces y sonidos para la nueva generación, los más pequeños... que bueno, ya no son tan pequeños...
Desde Culiacán, Sinaloa, donde vine a dar un curso de programación para la Olimpiada de Informática, con gran gusto les comparto algunas de las últimas prácticas que hemos hecho en el taller.
Buscando al pollito en el laberinto
Se trata de un pequeño laberinto, parecido al del fauno, pero en este lo que hay al final es un pollito, así todo bonito, amarillito. Para esto se utilizó el sensor de ultrasonido y la programación de bucles while.
Perrito Mecánico y Hormiga Mecánica
Se trata de dos animalitos que en la vida real no se parecen mucho que digamos, pero en el mundo robótico ¡vaya que si se parecen!, bueno un poco. Al menos ambos son igual de raros.
Se trata de dos autómatas que se mueven, uno de ellos camina, y el otro trata de agradar a la gente moviendo la cola, levantando las cejas, y ladrado (pero en voz baja, para que la gente no se moleste).
Esta es la última publicación que haré antes de nuestra primera participación en la competencia WRO. Ya solo faltan dos semanas, y aunque ha sido todo muy difícil, poco a poco hemos ido resolviendo los problemas que se han ido presentando. Sin embargo, aún nos faltan algunas cosas, pero estamos trabajando con todo para resolverlas.
Mientras tanto, les comparto aquí lo último de lo último que hemos hecho en el taller,
El Dragster
Se trata de un carrito que se impulsa desde una base elevada, y después se deja a caer para que salga disparado con el impulso que lleva. Como verán, avanza una distancia considerable 😀.
Sumo
Una vez más, les tocó a la siguiente generación practicar un poco el sumo, en esta ocasión usando control remoto. El objetivo era que detectaran la estrategia para vencer al robot del contrario. Independientemente del resultado obtenido, estoy seguro de que se llevaron bastante diversión 😁.
Visitando a los elefantes
Por último, aquí está la práctica realizada por los más pequeños. Se trata de un robot que para poder visitar a los elefantitos tiene que controlar diversos recorridos y vueltas.
¿Ya casi listos para nuestra primera participación en una competencia? Pues si, ya casi estamos listos 😀, ya solo faltan unos detalles: el hotel 😦, el uniforme 😧, el transporte 😨, algunas piezas del robot 😩, el programa 😪.... Bueno pero hay vamos 😁 😉.
Sigue líneas
En esta ocasión les muestro uno de los logros más recientes. Se trata de un sigue líneas, pero este si ya está completo. Es una primera versión con instrucciones más o menos sencillas.
Verán que va lento porque la pista está extremadamente ruda, tanto que hasta se le tuvo que hacer una pequeña modificación para que no fuera tan imposible. Como ejemplo les puedo decir que pusimos un MakeBlock mBot con el programa que trae precargado para seguir líneas, y no recorre más de 30cm cuando ya perdió el camino, se pierde totalmente, simplemente no puede hacerlo.
Y sucede que en realidad, en las competencias, las pistas no son tan terribles. Aquí les muestro unos ejemplos de pistas de competencia:
Así es que este mismo robot, con el mismo programa, simplemente con más velocidad, es suficiente para resolver casi cualquiera de las pistas que ponen en las competencias. Además, no hay que olvidar que no siempre gana el que va más rápido:
Bueno, pues aquí esta el robot sigue líneas:
Robot que pone un puente
Una práctica divertida que se realizó hace poco fue la de un robot que se encuentra con un precipicio, y para poder cruzar coloca un puente y después pasa sobre de el.
En general esta práctica quedó bastante bien, solo que tiene el pequeño inconveniente de que las orugas, al ser de plástico igual que el puente, pues se resbalaban. Pero afortunadamente a las alumnas ¡se les ocurrió una idea genial para solucionarlo!
¡Hey!, ¡Me pareció ver mano negra!
Grúa de 3 movimientos
Por último, les presento la última vez que se construyó una grúa de 3 movimientos. Difícil, pero pudieron hacerla:
Espero les haya gustado. ¡Nos vemos pronto con más pato-aventuras, o mejor dicho, robo-aventuras!
Se trata de un nuevo aditamento que adquirimos hace unos meses, con el cual se puede controlar el robot vía remota, más o menos como si fuera una televisión. Con este control se le puede decir al robot que avance o que haga algo cuando se presione un botón o una combinación de botones.
Así es que ya no tendremos que estar agachándonos para manipular el robot. Ahora podremos hacerlo ¡desde la comodidad del sofá 😄! El único problema ahora es que... no tenemos sofá 😔
Aquí les muestro un par de ejemplos, para que vean como funciona:
Y bueno, aprovechando el calorcito, y aprovechando también que son vacaciones (esto ocurrió en semana santa), pues nos dimos cita en el zoológico. Y con gran sorpresa vimos un pequeño pero intrépido ratoncito, que andaba de un lado a otro, creo que el también estaba recorriendo el zoológico. Véanlo nada más:
Con gran emoción les platico que ya publicaron las sedes para participar en los regionales de la WRO (World Robot Olympiad). Así es que ya nos estamos preparando para inscribirnos y nos estamos preparando también para ver los asuntos del hotel y todo eso :) La verdad estamos aún indecisos si inscribirnos en la de Toluca o en la de Ciudad de México.
Sin embargo, mucho más importante que todo eso, es la preparación de los participantes. Así es que aquí les muestro lo que hemos hecho en las últimas sesiones del taller de robótica.
Laberinto
Esto es, nada más y nada menos, que nuestro primer laberinto. Me refiero al primer programa del robot que resuelve un laberinto. No es un laberinto completo, con múltiples caminos. Aún falta tiempo para que los participantes puedan aprender eso. Sin embargo, es ya un comienzo. Sobre todo considerando que todo el programa está hecho a base de consultar los sensores que tiene incorporados el robot. A ver que opinan.
Sigue líneas
Y bueno, siguiendo con el asunto de los sigue líneas, aquí tenemos uno aún básico, que no es capaz aún de resolver una forma de 8, pero que si la puede ir siguiendo aunque sea por la parte externa de la línea.
Rascacielos
También en esta ocasión, les muestro aquí una práctica de estructuras. Se trata de un rascacielos. Ya lo habíamos presentado antes, pero este fue construido por otro grupito de alumnos (bueno, en realidad, alumnas).
Un ratón en el almacén
Y para terminar, les cuento que justo donde solemos almacenar nuestro material de trabajo, ¿que creen que paso? ¡Que se metió un ratón! Sucede que alguien dejó por ahí tirado un pedazo de queso, y en la noche vino un ratoncito que anduvo por ahí, deambulando hasta que lo encontró.
Ehmmmm, me pareció ver mano negra 😡 Está bien, haré como que no vi nada.
Pues sucede que con todo el estrés y el nerviosismo que nos genera la competencia que ya pronto va a empezar, decidimos tomarnos un break. Así es, ¡decidimos tomarnos unas vacaciones!, para despejarnos, relajarnos, y regresar para seguir preparándonos con todo, por que ¡vamos por el primer lugar! No sabemos si lo conseguiremos, pero esa es la meta y nos estamos esforzando para alcanzarla.
Teníamos varias alternativas: Cancún, Acapulco, Puerto Vallarta, Las Barrancas del Cobre... Pero entonces dijimos "No. Si se trata de despejar la mente, vamonos a lo grande". Entonces hubo otras propuestas: Disneylandia, Hawaii, Parías, Australia...
Como no nos decidíamos, en un arrebato que nos alocamos y nos vamos de safari. Así es, nada más y nada menos que el famoso Kilimanjaro Safari. Y no pudo ser mejor. Vimos todos los animales que queríamos: tigres, jirafas, rinocerontes, elefantes, jaguares, antílopes, etc. etc. etc. Aquí les comparto algunas de las mejores fotos que tomamos en esta fascinante aventura.
Nos tocó ver varias especies de animalitos que avanzaban en manada, encabezados por un elefante mecánico:
También vimos un tigre aprendiendo a treparse a los árboles, supervisado por una jirafa mecánica:
Luego, un tigre acechando a un antílope mecánico... pobre 😞
Vimos una familia de rinocerontes (uno de ellos mecánico) y un par de elefantes, en la mismísima roca donde nació el Rey León:
Y por último, a un jaguar mecánico y a un tigre acechando a unos elefantes. !Vaya que este duelo estuvo bueno¡
Debemos todo esto a los participantes de la nueva generación. Si no fuera por su excelente labor construyendo los animales mecánicos, nada de esto hubiera sido posible.
Como siempre, seguimos aquí trabajando, preparándonos, haciendo lo que nos toca para que México sea cada vez un mejor país.
Tratando siempre de innovar, algunas de las prácticas que verán a continuación son totalmente originales, hasta con ganas de patentarlas 😕
Perrito guardián
Esta práctica esperaba publicarla dentro de un mes, pero la verdad es que me gustó tanto que no me pude aguantar las ganas, ya verán por que.
Se trata de simular un perrito como aquellos pequeños que, cuando un desconocido está rondando, se ponen muy bravos, ladrando, defendiendo la casa. Pero apenas te volteas para enfrentarlos, les da miedo y se hacen para atrás. Vean como quedó:
Bien lo decía mi abuelita: Perro que ladra no muerde.
Sigue líneas con obstáculos
Siguiendo con nuestras pruebas de sigue líneas, esta vez haciendo que el robot evite los obstáculos. como verán, vamos por buen camino, o mejor dicho, el robot va por buen camino. Ojo, quiero aclarar que para todo se usan sensores: para seguir la línea, para detectar el obstáculo, para girar, etc.
Grúa de 3 movimientos
El trabajo de las nuevas generaciones esta vez consistió en una grúa de 3 movimientos. ¡Es la construcción más compleja que han realizado hasta ahora!
Ratón
Por último, aquí está una pequeña muestra de nuestro último integrante que empezó a usar el ratón hace apenas unas clases.
Hola a todos. En este caluroso día les presentaré algunas prácticas de uno de los temas más difíciles de la programación. Se trata de la famosa instrucción "if", aquella que durante tanto tiempo ha sido la culpable de que tantas y tantas personas que alguna vez ingresaron a la prepa deseando aprender computación, terminen desertando.
Es lo que les hace pensar cosas como: "si si, pero si no, entonces si si, y si no pero entonces si si y si no pero si......... auch, ya me equivoqué" 😖
Afortunadamente eso no paso con mi equipo 😅 ¡¡Qué suerte!!
Bien aquí vamos.
Buscando el correcto
En este primer ejemplo, el robot tiene que buscar el bloque amarillo y quedarse ahí donde lo encuentre.
En este segundo ejemplo, el robot tiene que buscar el camino hasta la pared del fondo.
Rescatando al rinoceronte
Una vez más, tratando de ayudar a la preservación de los animalitos, en esta ocasión rescatando a un rinoceronte.
Un ratón perdido en la jungla
Por último, resulta que nos topamos con un pequeño ratoncito que se perdió en la jungla el pobre. Véanlo aquí sorteando los peligros, tratando de llegar a casa:
¡Aguas con el tigre! Lo siento, pero tuve que detener la grabación, antes de que chocara con el tigre y ¡provocara su furia!
Hola a todos. El día de hoy, sin mucho que festejar (me refiero a que ya terminó la temporada navideña, las vacaciones, y hasta los tamales del 2 de febrero ya se terminaron también), y algo desconcertado por una gran ausencia que tuvimos, que me sacó un poco de onda.
Pero superando los altibajos que de pronto nos depara la vida, les presento los últimos trabajos que hemos estado realizando.
Trasladando a la pitufina
En esta ocasión, ya con vistas a participar en la WRO, lo que se les pidió a los participantes fue llegar hasta donde está la pitufina, y trasladarla hasta la zona roja de seguridad. Todo esto fue realizado con sensores, detectando las líneas negras y los espacios de color que hay en el piso. Espero les guste.
Sigue Líneas
También con gusto les presento nuestra primera práctica de robot sigue líneas. Es muy cortita, pero está bien para empezar. Poco a poco se irá creciendo, arreglando y perfeccionando. Por lo mientras, aquí está nuestro primer intento. El robot debe seguir la línea hasta llegar al piso rojo.
Power Car
Esta es una práctica sencilla, es básicamente un carrito que tiene incorporado un motor. El objetivo es encontrar la mejor combinación de engranes y ruedas para que el carrito avance lo más rápido posible, con diferentes grados de inclinación, y arrastrando diferentes pesos. Como verán, avanza bastante bien.
Esquivando a los elefantes... bueno, casi
Aquí una práctica más de los nuevos integrantes, que aún no usan sensores; solo el control de los motores, esta vez tratando de formar un 8 sin atropellar a los elefantes... bueno, casi 😆.
Rescatando a la pitufina
Y por último, pues, no bastaba con dejar a la pitufina en la zona roja de seguridad. Después de eso había que terminar de rescatarla. Afortunadamente tenemos a los más peques, que se encargaron precisamente de eso.
Hola a todos. Cada vez está un poco más cerca el día de nuestra primera competencia 😀 por eso estamos preparándonos con mucho entusiasmo, pero sobre todo con muchos nervios 😨.
Esta vez con varios proyectos interesantes. ¡Aquí vamos!
¡Oh no! ¡Está temblando!
Recordando lo que sucedió en la capital del país hace unos meses, en septiembre, decidimos prepararnos para estar listos para cuando vuelva a temblar. Así es que esta vez se le solicitó a los participantes que construyeran un robot con los sensores necesarios para detectar cuando el piso se mueve. Y cuando eso pase, que se detenga (para no caerse) y que haga una expresión de susto. A ver que les parece:
Energía Eólica
Conscientes de los gastos que se producen por el uso de combustibles, sobre todo ahora que ha estado subiendo tanto la gasolina, y nosotros que necesitamos ahorrar para poder asistir a la WRO (World Robot Olympiad), decidimos poner a prueba el uso de la energía eólica para impulsar los carritos que usamos a veces. Aquí está el resultado:
Esquivando conos
Aun no sabemos que es lo que les van a poner a hacer en la competencia, pero por si acaso, y solo para estar prevenidos, esta vez les tocó esquivar unos conos, tal como lo hacen los autos de carreras cuando se preparan para competir.
Una invitada muy especial
En este día, tuvimos una invitada muy especial, que llegó directamente desde la ciudad de México. Se trata nada más y nada menos que de mi sobrinita 🙋. Le tocó armar un sube y baja junto con uno de los niños de la nueva generación. Miren como le quedó:
Con gusto saludándolos de nuevo. Esta vez con más prácticas, sobre todo de sensores, como les había comentado, como parte de la preparación para participar en nuestra primera competencia... ¡Huy, que nervios 😥!
También, ahora con uno de los primeros trabajos de la última persona que se integró hace poco al taller.
Bueno, a lo que vamos. Aquí está lo último que se ha realizado.
Atropellando a las pitufinas
Aquí, lo que tenían que hacer, era atropellar a las pitufinas que están heridas (para asegurarse de que ya no sufrirán más, claro está). Es importante que sepan que esta práctica se realizó 100% usando sensores (de color, de ultrasonido, de giro, etc.). A ver que les parece.
Chocando con las paredes
En esta otra práctica, el objetivo era usar el sensor táctil para detectar cuando el robot chocó con las paredes. Y el sensor de giro para controlar las vueltas de 180°.
Visitando a los animalitos
Y este es precisamente el trabajo de nuestra nueva integrante. Se trata de un robot que visita a sus cuates los animalitos. Esto no usa sensores, aquí solo se usaron funciones de avance y vuelta, al tanteo.
¡¡Epa!! ¡¡Está borracho!! Ok, en realidad no. Es solo que el centro de gravedad está muy alto. Es parte del aprendizaje. Ahora ya sabe que le tiene que poner los ejes de las llantas un poco más largos.
Rueda Libre
Aquí, realizando pruebas de un carrito con Rueda Libre. ¿Cómo llegará más lejos? ¿con llantas más grandes? ¿con llantas más pequeñas? ¿es que el tamaño de las llantas no importa? ¿con más altura? ¿con menos? No se preocupen, l@s alumn@s ya tienen la respuesta, solo habrá que preguntarles a ell@s.
Carrito de carreras
Por último y como siempre, aquí está el trabajo de las nuevas generaciones, nada más para que se queden con el ojo cuadrado: ¡¡un carrito de carreras, eh!!
Un arreglo es parecido a una variable, solo que en vez de
almacenar un solo valor, puede almacenar varios. La representación
tradicional de un arreglo es la siguiente:
Se trata de un contenedor, que dentro tiene varios elementos
individuales. Cada uno de estos elementos es equivalente a una variable. Para
acceder a los elementos individuales se utiliza un índice. Así, el elemento con
el índice “0” es el primer elemento del arreglo; el elemento con el índice “1”
es el segundo elemento del arreglo; etc.
A continuación se muestra como usar arreglos con el robot Lego MindStorms EV3.
Lego MindStorms EV3
Los arreglos se usan con la instrucción Operaciones secuenciales.
Primero se necesita una variable de tipo Secuencia numérica o Secuencia lógica. A partir de ahí, utilizando la instrucción Operaciones secuenciales, se pueden agregar más elementos al arreglo, se pueden escribir y leer los valores que tiene almacenados, y también se puede saber cuántos elementos tiene.
Ejemplos
Lego MindStorms EV3. Aquí se tiene un arreglo que tiene almacenados tres elementos, con los valores {20, 50, 100}. Después, usando la instrucción Operaciones secuenciales, se obtiene el valor del primer elemento (elemento en la posición “0”) y se asigna como velocidad para el robot. Después se hace lo mismo con el segundo elemento (elemento en la posición “1”), y por último con el tercero (elemento en la posición “2”).
Aquí, como siempre tratando de innovar, y al mismo tiempo preparándonos ya para lo que parece ser la primera competencia de robótica a la que asistiremos. Para eso se necesitan practicar mucho el uso de los mecanismos, los motores, los sensores y, por su puesto, la programación.
Prácticas de Sensores
Como ya lo mencioné, aquí un par de prácticas de sensores. En esta ocasión, el sensor táctil para detectar cuando el robot choca con las paredes, el sensor de giro para controlar las vueltas, y el sensor de color, para detectar líneas en el piso.
Carrera contra reloj
Esta vez, les tocó armar un reloj de arena... bueno casi, digamos que funciona más o menos igual que un reloj de arena... solo que no tiene arena, y de hecho, no se parece nada a un reloj de arena. Es un reloj que corre durante un tiempo hasta que el peso que lo impulsa llega al piso. Se escucha fácil, pero tardaron como 2 horas en armarlo.
Y aquí está el resultado. La meta era ver quien llegaba más lejos acarreando a los más peques del club.
Rescatando al Rinoceronte
Aquí una práctica con otra tecnología. Se trata de una grúa que eleva un rinoceronte.... ¡¿y un carro?! ¡¡huff!! Bueno 😃
El control remoto por infrarrojos funciona de forma muy similar al control remoto de las televisiones. Básicamente consiste en pulsos emitidos mediante una luz infrarroja (por lo tanto invisible para los humanos). Esos pulsos son recibidos mediante el efecto fotoeléctrico por el receptor.
Cada comando tiene una cantidad de pulsos en específico. Por ejemplo, el comando para subir el volumen pudiera ser, digamos, de 20 pulsos, mientras que el comando para bajar el volumen pudiera ser, tal vez, de 22 pulsos. Y así, dependiendo de la cantidad de pulsos que se recibieron, es el botón que se presionó en el control remoto, y es por lo tanto el comando que se debe de ejecutar.
Con los robots ocurre exactamente lo mismo, solo que aquí los comandos no significan subir o bajar el volumen, sino que en el programa se le pude poner que el robot haga cualquier cosa que se requiera.
Al igual que ocurre con la televisión, es necesario que la luz infrarroja, cuando viaja, tenga el camino libre para llegar hasta el sensor. De no ser así, el comando nunca podrá llegar a su destino.
A continuación se muestra como se utiliza el control remoto con el sensor de infrarrojos para el robot Lego MindStorms EV3.
Nota. Al control remoto del robot Lego MindStorms EV3 también se le llama "baliza".
Lego MindStorms EV3.
El sensor de infrarrojos comúnmente se usa con el comando "Esperar", con el cual el robot continuará realizando cualquier cosa que esté haciendo hasta que el sensor de infrarrojos realice la detección esperada. También se puede usar con las instrucciones de control "Bucle" e "Interruptor".
Se puede usar de dos formas: una es para detectar cuando se presionó un botón del control remoto (o baliza). La otra forma es para detectar la distancia de la baliza al sensor, o su orientación. Cabe aclarar que no son distancias absolutas, sino que son números del 0 al 100. Un valor alto significa que la baliza está lejos del sensor infrarrojo, y un valor bajo significa que está cerca.
Cuando se usa para detectar la orientación se tendrán valores desde -25 hasta 25. El cero significa que la baliza se encuentra viendo de frente al sensor.
Ejemplos
Lego MindStorms EV3. Aquí, el robot estará esperando a que se presione un botón del control remoto. Cada vez que se presione el primer botón, avanzará 1 segundo.
Lego MindStorms EV3. Aquí, el robot estará girando hasta quedar de frente a la baliza. Cuando esto pase, se detendrá.
El sensor de infrarrojos es un poco parecido al sensor de luz y al sensor de color, y también al sensor de ultrasonido.
El sensor de infrarrojos también se utiliza para detectar la cercanía o lejanía de los objetos, para esto emite un haz de luz y después recibe la luz reflejada. Solo que la luz que emite es infrarroja, por lo tanto no es visible para el ojo humano. También utiliza el efecto fotoeléctrico (descrito en la sección de Sensor de Luz) para detectar la cantidad de luz que se recibió.
A continuación se muestra como se utiliza el sensor de infrarrojos con el robot Lego MindStorms EV3.
Lego MindStorms EV3
El sensor de infrarrojos comúnmente se usa con el comando "Esperar", con el cual el robot continuará realizando cualquier cosa que esté haciendo hasta que el sensor de infrarrojos realice la detección esperada. También se puede usar con las instrucciones de control "Bucle" e "Interruptor".
Se puede usar de dos formas: una es para detectar un reflejo de luz infrarroja en específico, por ejemplo 10 o 100. En este caso solo se especifica la cantidad que se espera, y se elije un operador para decir si la luz reflejada debe ser mayor, menor, mayor o igual, o menor o igual, que la intensidad especificada. La otra forma de usarlo es para detectar un cambio en la intensidad de la luz infrarroja reflejada. En este caso lo que se especifica es si ese cambio debe ser un aumento o una disminución, y se le dice de que tamaño debe ser ese cambio. En general, un valor alto, significa que el objeto se encuentra lejos, y un valor bajo significa que está cerca, aunque no se tiene una distancia precisa. De hecho, los valores pueden variar para objetos con diferentes texturas, aunque estén a la misma distancia.
Ejemplos
Lego MindStorms EV3. Aquí, el robot avanzará hasta que la intensidad de la luz infrarroja reflejada indique que un objeto está cerca, con un valor menor a 10. Cuando eso pase se detendrá.