Todos los lenguajes de programación tienen incorporados varios conjuntos de funciones de diferentes tipos, para ser utilizadas en diferentes circunstancias. Por ejemplo, existen funciones para realizar cálculos matemáticos avanzados, tales como seno, coseno, tangente, etc.; existen funciones para hacer operaciones con texto, como por ejemplo juntar dos textos en uno solo, o conocer el tamaño del texto; también existen funciones para manipular fechas y horas, por ejemplo, para saber que valor queda si se le suman algunas horas a la hora actual; etc.
En el caso de los robots, solamente se utilizan las funciones más útiles, como son: obtener un número al azar, redondear un número, saber si un número es par o impar, etc.
A continuación se muestra como usar las funciones que tienen incorporadas los robots MakeBlock mBot y Lego MindStorms EV3.
MakeBlock mBot
Este robot tiene las siguientes funciones: generar un número al azar, redondear un número, y saber si un número es par o impar, positivo, negativo, número primo, etc.

Para redondear un número se usa el comando "redondear", donde se elige la forma en que se debe redondear (hacia arriba, hacia abajo, etc.).
Para saber las características de un número se elige el comando "es...", y después se elige la característica que se requiera saber del número (si es par, impar, positivo, negativo, etc.).
Para generar un número al azar, se elige el comando "entero aleatorio de ... a ...", donde se elige el rango de números de entre los cuales se tomará uno al azar.
Este robot tiene las siguientes funciones: generar un número al azar, combinar texto, y redondear un número.
Para generar un número al azar se usa el comando "Aleatorio", al cual solo se le dice el rango de valores de entre los cuales se tiene que producir uno al azar.

Para redondear un número se usa el comando "Redondear", donde se elige la forma en que se debe redondear (hacia arriba, hacia abajo, truncar, etc.), y se le dice el número al cual se le va a aplicar esa operación.

Y para combinar texto se elige el comando "Texto", al cual se le dicen cuales son los textos que se van a juntar.

Ejemplos
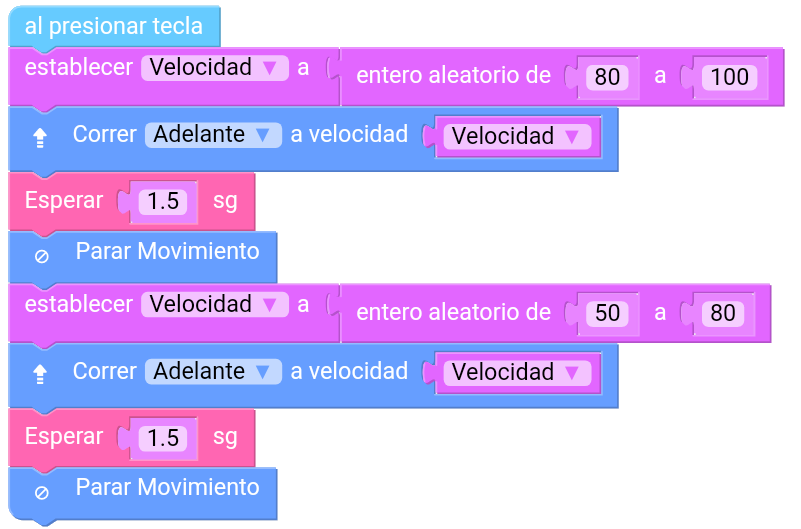
MakeBlock mBot. Aquí, se genera un número al azar entre 80 y 100, y se toma ese número para que sea la velocidad del motor. Después se toma otro número al azar entre 50 y 80, y de nuevo se toma ese número para que sea la velocidad.
Lego MindStorms EV3. Aquí, se genera un número al azar entre 80 y 100, y se toma ese número para que sea la velocidad del robot. Después se genera otro número al azar entre 20 y 40, y nuevamente se toma para que sea la velocidad del robot.